
Experience
A collection of my research and course projects, focusing on Generative AI, Embodied Intelligence, and 3D Vision.
Ongoing Projects
CrystalReasoning
- Date: 11/2025 – 05/2026 (expected)
- Description:
- Under the guidance of Prof. Sherry Yang
- Using LLMs to develop an end-to-end framework for Crystal Structure Generation (CSG) problem. The model should be able to generate crystal structures from high-level text instructions.
- Optimizing structures by utilizing abstract-to-concrete reasoning traces and well-designed reinforcement learning reward functions.
Project Experience
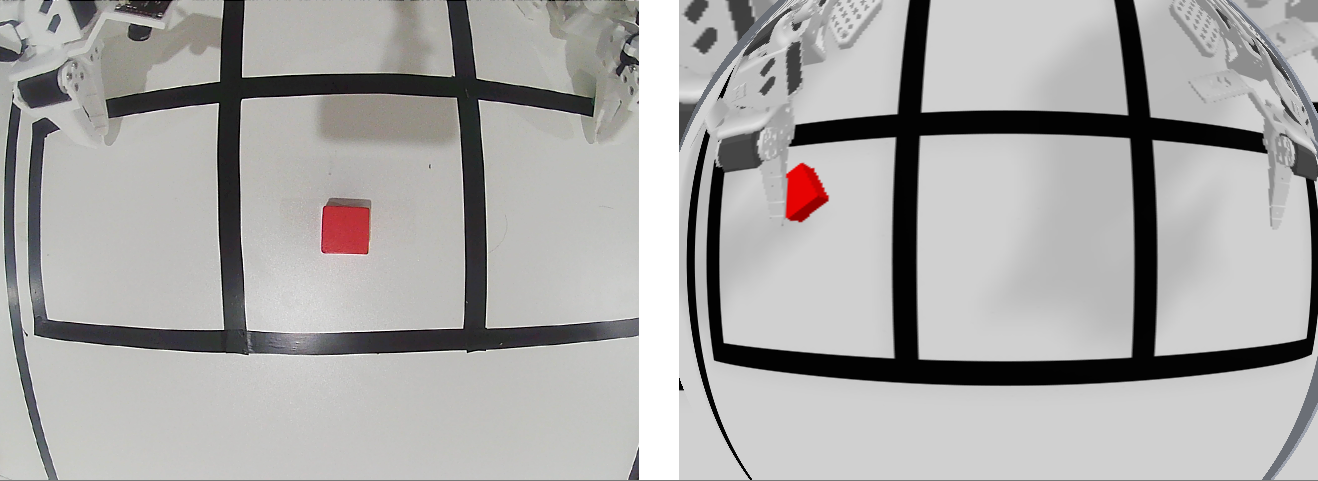
Adam’s Hand: A Dual-Arm Handover Policy with Instruction Following
- Repository: wyy603/eai_final
- Collaborators: Guohao Jing, Youbo Shao
- Date: 11/2025 – 01/2026
- Description:
- Built a realistic simulation environment based on the LeRobot SO-101 platform and implemented a self-developed gradient-based Inverse Kinematics (IK) solver for robust expert data collection.
- Trained an end-to-end policy using an Action Chunking Transformer (ACT) and evaluated performance across standard Track 1 benchmarks and custom long-horizon planning tasks.
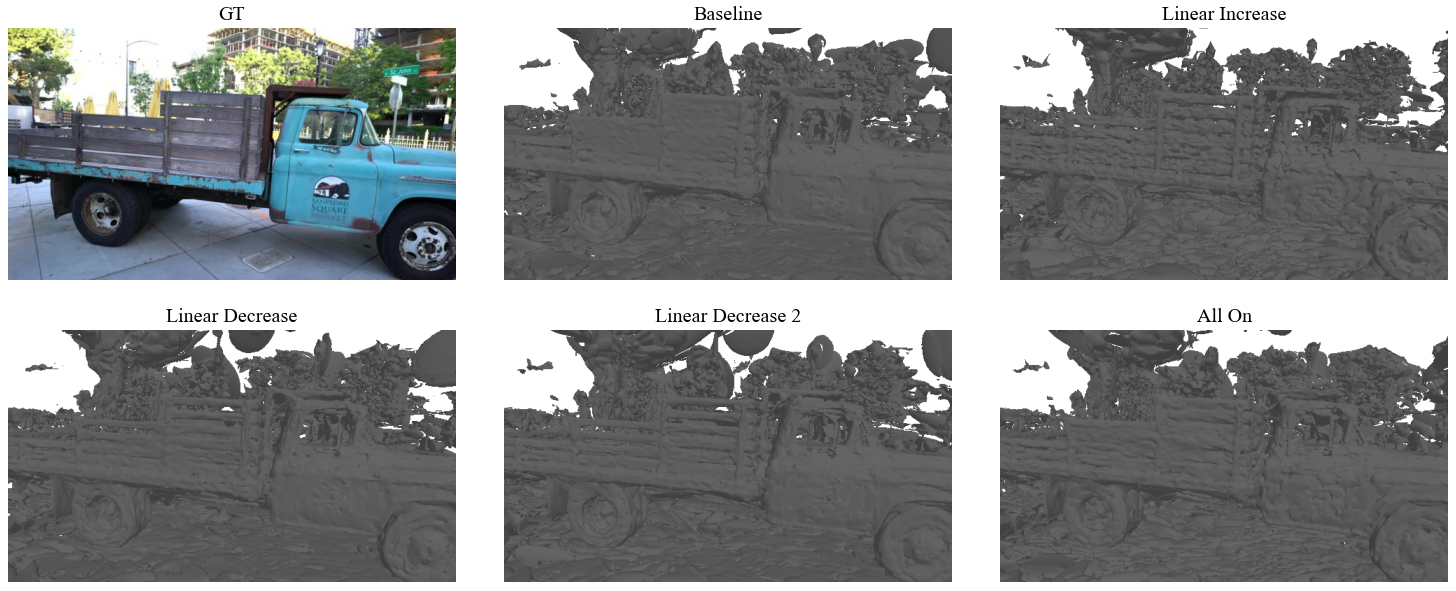
Supervised Prior for Aligning Surface of Gaussian Splatting
- Repository: shaoyoubo/Supervised_Sugar
- Collaborators: Youbo Shao, Kaixin Zhang
- Date: 04/2025 – 06/2025
- Description:
- Combined external normal and depth supervision with regularizations from SuGaR (Surface-Aligned Gaussian Splatting for Efficient 3D Mesh Reconstruction and High-Quality Mesh Rendering) to extract accurate surface meshes from 3DGS.
- Developed a multi-stage training process to balance different regularization terms.
Humanoid Running in Simulated Environment

- Repository: wyy603/isr_project
- Collaborators: Ruinian Chang
- Date: 10/2024 – 12/2024
- Description:
- Trained a humanoid robot to run at high speeds on random terrain using reinforcement learning within a simulated environment.
- Utilized IsaacGym as the simulation environment and PPO as the primary reinforcement learning algorithm, incorporating Rapid Motor Adaptation to achieve swift environmental adaptation.
- Performed multiple training iterations, adjusting parameters each time to continuously increase average movement speed.
Overcraft: A Web-based Cooperative Party Game

- Repository: wyy603/acg_project2
- Collaborators: Guohao Jing
- Date: 10/2024 – 12/2024
- Description:
- Designed a web-based cooperative party game where users play similarly to Overcooked, involving cooking, grabbing, and throwing food in a 3D world.
- Implemented an Entity Component System (ECS) for data management and utilized Three.js for rendering, Ammo.js for physics, React for UI design, WebSocket for multiplayer functionality, Vite for the front-end, and Node.js for the back-end.
Research Experience
Retargeting Human Animation to Humanoid
- Institution: Tsinghua University
- Location: Beijing, China
- Date: 02/2025 – 07/2025
- Description:
- Conducted research under the supervision of Professor Li Yi.
- Developed an animation retargeting framework that generates realistic humanoid motions from human animations while strictly preserving physical properties.
Would you like me to refine the wording of the bullet points to make them sound more “action-oriented” for a CV or resume?